Sumô
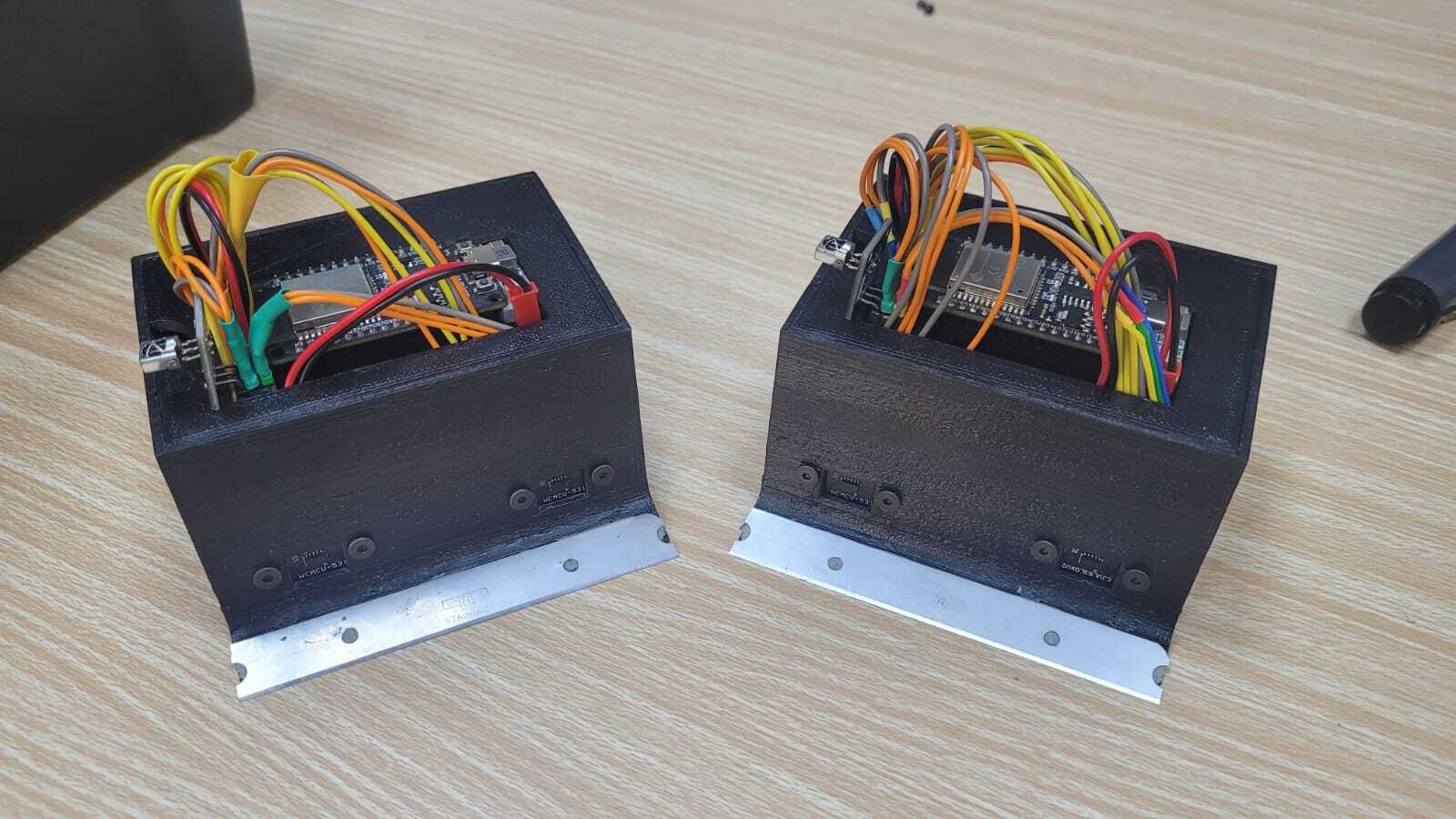
Nosso robô da categoria sumô, foi desenvolvido com a utilização de sensores infravermelhos e a laser como entrada de informações para o controle autônomo do robô. Outra característica importante do controle robô é a utilização da programação “Fuzzy”, com uma lógica diferente da booleana, fundamental para o posicionamento e tomada de decisões do robô. Uma das maiores dificuldades recai sobre as limitações de tamanho do robô, que na categoria que disputamos tem o limite 10cm x 10cm.
Para construí-lo, conhecimentos nas áreas de modelagem, mecânica, elétrica e eletrônica são fundamentais. A parte de modelagem é desenvolvida em CAD (desenho assistido por computador) em softwares como Solidworks, para modelagem mecânica, e Eagle, para a eletrônica. Já a programação é realizada na IDE (ambiente de desenvolvimento integrado) do Arduino, sendo a linguagem mais utilizada a C++.